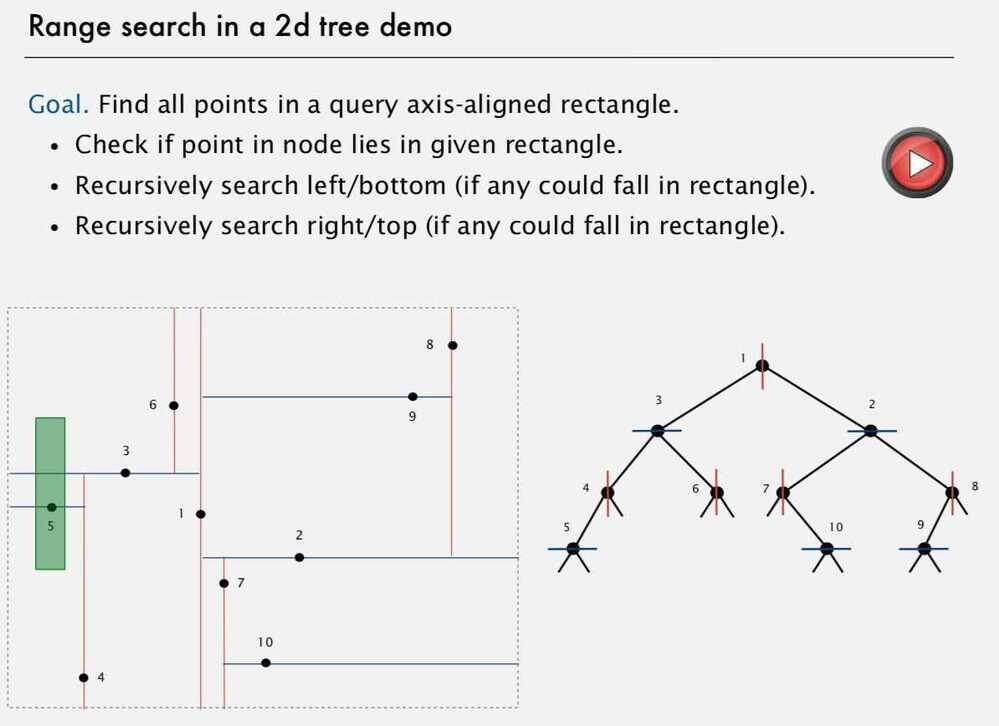
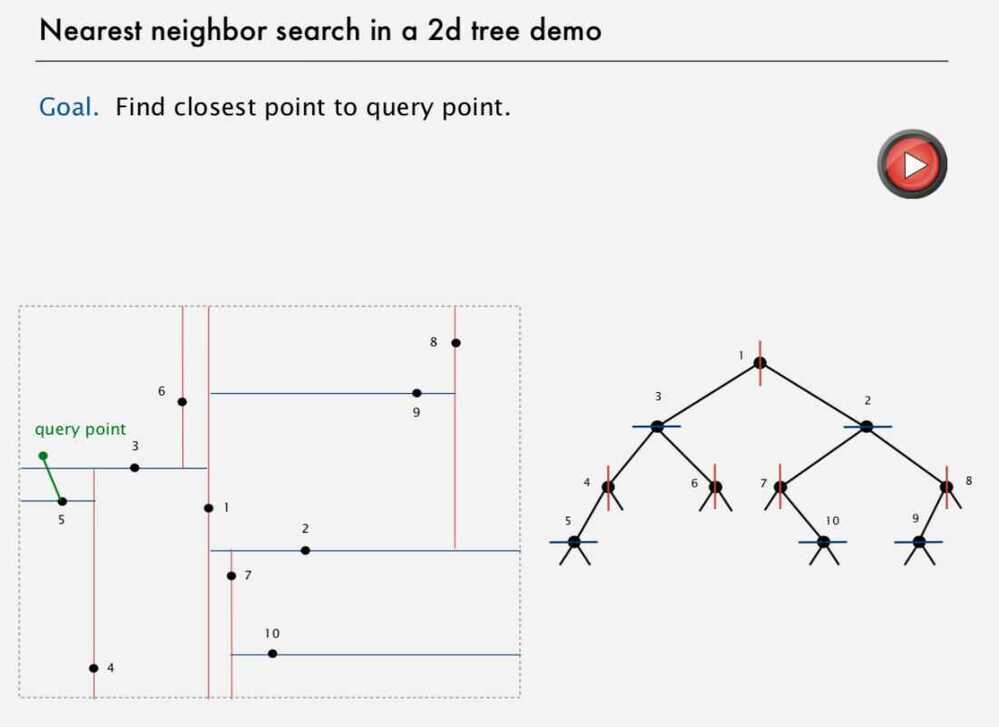
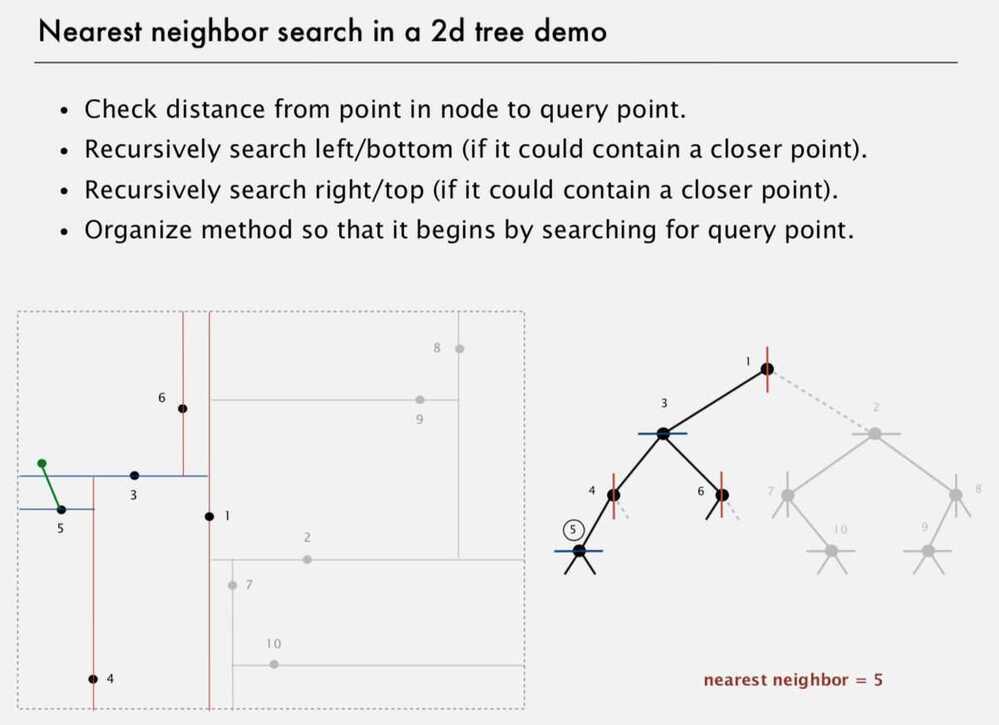
AlgorithmsComprehensive Guide to Algorithms2D Orthogonal Range Search AnalysisOn this page2D Orthogonal Range Search Analysis Analysis Typical case: R + log N Worst case (assuming tree is balanced): R + sqrt(N) Analysis Typical case: log N Worst case (even if tree is balanced): N